Solutions for Unmanned Vehicle

Enhancing Inertial Navigation System Performance with Radar
By leveraging the strengths of both radar and INS, engineers and researchers can develop more capable and adaptable autonomous robots for a variety of applications, from industrial automation to autonomous vehicles.

Analysis of MIP vs NMEA Aiding Information with the MicroStrain 3DM-CV7-INS
MicroStrain Field Applications Engineer, Aidan Laracy, did a deep dive to compare the performance of NMEA and MIP GNSS data input methods for the 3DM-CV7-INS. Learn as he explores the trade-offs between ease of integration and precision.

Product Comparison: GX5 Series vs. GV7 Series
The GV7 series of inertial sensors offers improved performance and functionality over the GX5 series while maintaining the same compact size and easy-to-replace design. This upgrade is ideal for those seeking higher accuracy and additional features.

REDUCING FLIGHT TEST CYCLE TIME FROM WEEKS TO HOURS
Immediate data feedback allowed flight engineers to make critical adjustments shortly after each test, enabling multiple tests per day. Previous test programs required week-long delays between flights for data analysis.

INERTIAL SENSING
Underwater Remotely Operated Vehicles (ROVs) and Unmanned Underwater Vehicles (UUVs) operate in extremely demanding environments that require precise and reliable feedback. Inertial navigation solutions must be very accurate…

Energy Efficient Drone Fleets
Parker LORD sponsors research to model energy consumption for quadcopter package delivery drones

Magnetometer vs Dual-Antenna Heading in Fixed-Wing Aircraft
This report compares the steps necessary to use magnetometer vs dual-antenna as a heading source for a Cessna 150M flown in a repeated flight profile.

LORD IMU Integration with Ardupilot
Drones already have their own internal IMU’s, but those IMU’s lack the accuracy needed for larger flight tasks. For shorter flights and recreational flying, the internal IMU is precise enough to keep the drone running as expected. As time goes on, small errors in the IMU readings add up and the total error may end up being very large by the end of a long flight. By using a high precision IMU, we can extend the flight time of the drone by increasing the accuracy of readings, thereby reducing the small errors.
UNMANNED ROTORCRAFT FLIGHT TESTING USING WIRELESS SENSOR NETWORKS FOR DATA COLLECTION AND CLOUD-BASED COMPUTING
Aircraft flight test has traditionally been expensive and time consuming to accomplish, requiring complex hardware design and integration and extensive operational test teams to address aircraft downtime for instrumentation maintenance and calibration, flight operations, and post-flight data handling and evaluation.

INTEGRATING WIRELESS SYSTEMS AND ROTORCRAFT HUMS
Optimize communication, data analysis, and battery life with a Wireless Network
Detail

FIXED-WING WIRELESS HEALTH MONITORING
Instant, comprehensive reporting of aircraft health, from nose to rudder
Detail

MICROSTRAIN INERTIAL SENSORS GUIDE UNMANNED GROUND VEHICLES
MicroStrain’s miniature, lightweight inertial navigation solutions improve navigational accuracy while reducing power consumption in next-generation unmanned ground vehicles (UGV).
Detail
MINIATURE INERTIAL SENSOR SOLUTIONS FOR UAV SYSTEMS
MicroStrain® provides high-performance inertial sensing systems with minimal weight,size, and integration barriers.
Detail

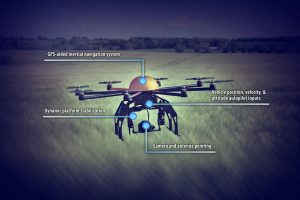
INERTIAL SENSING FOR UNMANNED AIR VEHICLES
MicroStrain® inertial sensors provide high performance in a very small and lightweight package. MEMS technologies combined with GNSS/GPS and sophisticated estimation filtering offer accurate and reliable data quantities to provide precise control, stabilization, and pointing at the best value.
Detail

BETA TECHNOLOGIES’ EVTOL DEVELOPMENT TAKES OFF WITH MICROSTRAIN SENSORS
Technology evolves as we improve how information is gathered, analyzed and implemented into various applications. For instance, Vertical Takeoff and Landing aircraft (-VTOL) can take off, hover and land vertically.
Detail

SETTING SAIL ON THE PACIFIC SPIRIT
A case study of the Microstrain 3DM-GQ7 with dual antenna and RTK modem to collect navigation and position data using SensorConnect Software.
Detail
![]()
Measuring Transmission Error – Case Study
Transmission Error, also called Torsional Vibration, is the study of the rotational speed of a rotating object. A shaft will not normally rotate in a smooth motion, but will actually accelerate and decelerate as it moves around its cycle. The study of this phenomena is Torsional Vibration.
Detail

Batteries Included – Case Study
The growth of electric vehicles has led to a race to understand and improve battery technology. A leading automotive research organisation chose Prosig to provide the system to assist them in developing the next generation of vehicle batteries.
Detail
Remote Monitoring – Case Study
Have you ever wondered if there is a vibration condition monitoring system that can be installed anywhere and then monitored from anywhere else? Even on your smartphone?
Detail